Sensor Ultrasonico HC-SR04
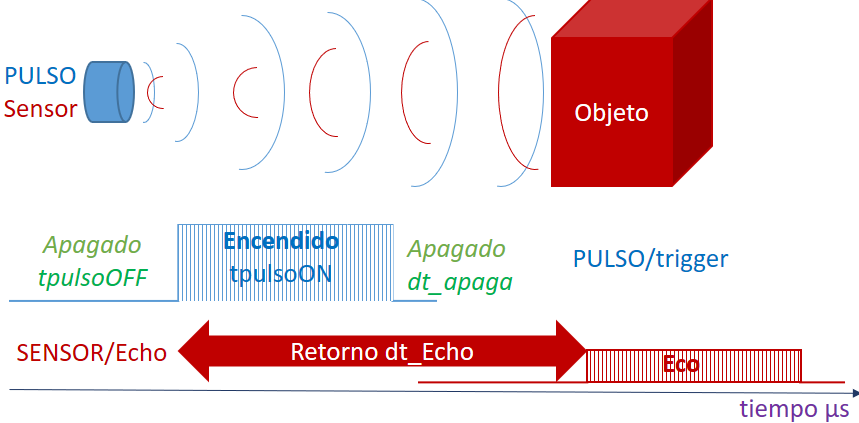
El sensor de ultrasonido funciona como un sonar, emite un pulso de ultrasonido por un tiempo de disparo, y luego mide el tiempo de retorno del eco.
El diagrama muestra el concepto a ser aplicado:
Usando la fórmula básica de velocidad se tiene que:
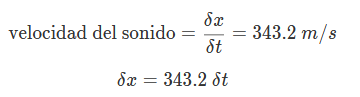
Considere además que la fórmula está dada en convertirla a segundos y los datos estan en μs.


Desarrollo del concepto
Se desarrolla el concepto en dos partes:
- En Arduino se realizan las lecturas de echo del sensor de ultrasonido, los datos se envían al computador por puerto serial (USB)
- Los dados se procesa en la computadora con el IDE de Arduino, fórmulas, conversión de unidades, gráficas, etc.
Lecturas de datos en Arduino
En la parte de Arduino se usan los siguientes componentes:
- Arduino UNO con cable USB
- Sensor de ultrasonido HC-SR04
- Cables de Conexión (4 hembra macho)
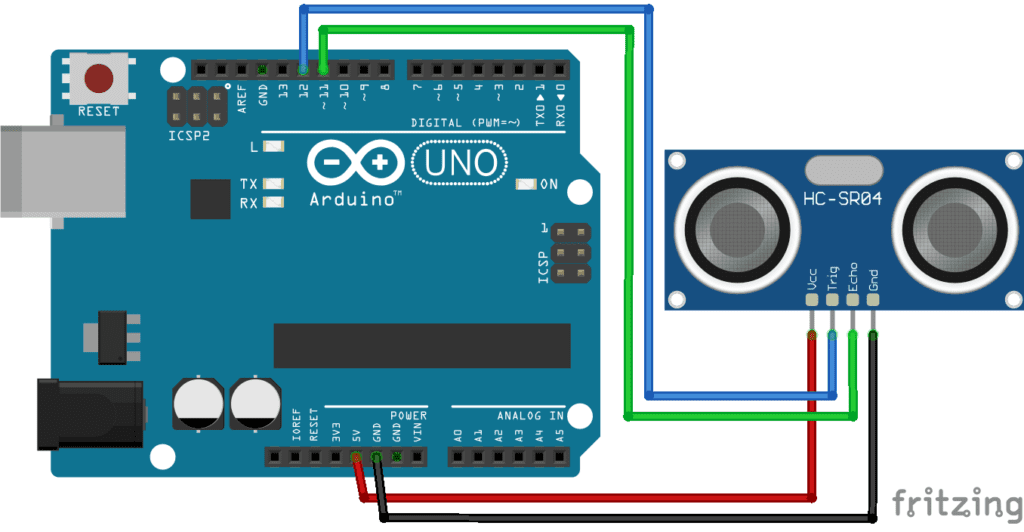
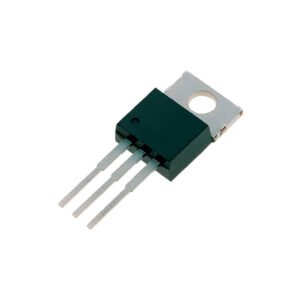
Sensor HC-SR04
El dispositivo HC-SR04 se opera como un dispositivo que requiere alimentación (Vcc y GND), una señal de disparo del pulso (Trigger) y una señal para la lectura del eco (Echo).
La duración del pulso se controla con tpulsoON, y el tiempo de apagado con tpulsoOFF, se usa un tiempo adicional dt_apaga, para asegurarse que no exista interferencia entre el apagado del pulso y la lectura del retorno del eco.
La conexión del dispositivo con el Arduino como controlador, se realiza por medio de los pines indicados en el script.
// Disparo del PULSO, Trigger
int TriggerPin = 12;
int tpulsoON = 15;
int tpulsoOFF = 2000;
// Sensor del Retorno del PULSO, Echo
int EchoPin = 11;
int dt_apaga = 10;
// tiempo de retorno Echo
float dt_Echo;
void setup() {
Serial.begin(9600);
pinMode(TriggerPin, OUTPUT);
pinMode(EchoPin, INPUT);
}
void loop(){
// tiempo entre PULSOs: tpulsoOFF
digitalWrite(TriggerPin, LOW);
delayMicroseconds(tpulsoOFF);
// Dispara PULSO de duración: tpulsoON
digitalWrite(TriggerPin, HIGH);
delayMicroseconds(tpulsoON);
digitalWrite(TriggerPin, LOW);
delayMicroseconds(dt_apaga);
// Lectura sensor pulso: tiempo de echo
dt_Echo = pulseIn(EchoPin, HIGH);
Serial.println(dt_Echo);
delay(10);
}